


2011 (32)
2014 (53)
2016 (53)
2017 (55)
2018 (98)
2019 (88)
2020 (67)
2021 (95)
2022 (266)
2023 (312)
2024 (200)

戴榕菁
2021年對我來說是打破能量守恒的一年。先是受到宇宙膨脹造成的光能損失的啟發,我發現了其實在宇宙中每時每刻都因紅移和藍移而隨機地損失能量及隨機地產生能量。後來DDWFTTW現象讓我確定即便是在宏觀的被認為屬於經典力學的範圍內的機械運動也同樣可以違背熱力學第一定律(即能量守恒定律)和熱力學第二定律。在對於DDWFTTW現象以及網上所介紹的曆史上人們曾經設想過的各種永動機模型所進行動力分析的過程中,我提出了無平衡態(de-equilibrium)的概念,說的是當一個係統不存在靜止平衡態的時候,它便成為一個永動機。
無平衡態的概念不僅是對於永動機的動力學特點的描述,而且是對於產生永動的動力學條件的表達或者說是對於成為永動機條件的一種嚴格定義。
但是,即便得知了產生永動機的無平衡態條件之後,我仍然對於到底是什麽原理使得永動機可以在沒有外力做功的前提下產生能量這個問題感到困擾。於是,在過去這段時間裏我開始反複思考是什麽樣的原理決定了宏觀機械運動的能量可以不守恒。隱約中我感覺到了是那個古老的杠杆原理,那個幾千年裏指導著人類用小力來產生大力的杠杆原理在這背後起著製造能量的作用。幾天前我決定用一個簡單的模型來驗證一下這個想法。我采用的模型很簡單,就是在一根杠杆的兩端各係一個重物,讓杠杆的支點偏離中心,杠杆的初始位置水平,初始速度為零。然後算它在運動中的總能量。因為這是一個非線性的問題,所以我很自然地想到了進行級數展開求近似解。我一開始隻取了非線性展開的第一項,結果得出了總能量增加的結論。當時感到又興奮又震驚。但是,第二天我重新進行推導時,沒有進行級數展開而是用精確解進行分析,結果發現能量是守恒的。也就是說,我在前一天是白興奮白震驚了一把。
於是我又仔細考查了一番杠杆原理與永動機之間的關係,明確了這樣一點:杠杆原理本身並不會打破能量守恒,但杠杆原理確實可以決定永動機的產生,那是因為杠杆原理可以幫助實現我前麵提到的無平衡態。無平衡態的存在才是永動機成為可能的最直接的原因,而杠杆原理則是間接的原因。
我們知道在一個引力場(如地球的引力範圍內)中的一個物體在引力的作用下將趨於最小勢能態,這個結論在經典力學和廣義相對論中都是一樣的。比如初始角度不為零的單擺在重力的作用下將會向最底勢能點運動,也就是向擺錘的豎直最底點運動。當到達該最底勢能點時,擺錘獲得由勢能轉化來的最大動能。但由於摩擦力的作用,擺錘的勢能的一部分會消耗為分子的熱運動,一段時間後,擺錘就趨於靜止。
但是,如果一個係統的最小勢能態是一個非平衡態,那麽即便有摩擦力所造成的能量耗損,它也永遠無法達到靜止態,因而將一直運動下去直到係統的條件(參數)改變,這就是所謂的永動機。下麵我們來看一個簡單的無平衡態的例子。
圖1中是兩個完全一樣(畫得不好,請大家發揮想象力)的十字形狀支架子及與之相連的細杆結構。每個架子的支杆都可繞其中心(O或O’)轉動。每個支杆的端點(A,B,C,D或A’,B’,C’,D’)都鏈接著一根與支架的杆子同等長度的細杆。每個細杆都可繞與支杆之間的鏈接進行前後轉動,但不能在與所連接的杆子垂直的方向移動。這兩個支架係統的選材要滿足這樣的條件:支架的材料要質量輕但強度大,不易變形,而與支架相連的細杆則要求質量大,也不易變形。這樣就可以保證在轉動過程中係統的慣性由細杆決定,而支架隻是起到連接細杆以及實現轉動的作用。
然後,我們將兩個支架係統相鄰直立著,並兩個支架的垂直平麵之間有個60°的夾角,並且將細杆a與a’,b與b’,c與c’,d與d’相互鏈接。那麽當支架的A,B,C,D以及A’,B’,C’,D’處於圖1中的正麵位置時,除了c與c’之外,其中的a,b,d以及a’,b’,d’就不會處於圖1中的位置。圖2是當支架的A,B,C,D以及A’,B’,C’,D’處於圖1中的正麵位置時的俯視圖。其中的虛線代表b,d和b’,d’細杆的位置。
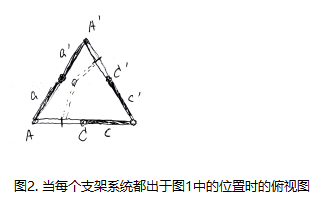
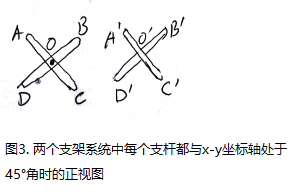
圖3是當兩個支架中的支杆都轉到與(想象中的)x-y軸成45°角時的正視圖。
而圖4為當兩個支架處於圖3中的位置時的俯視的示意圖。

我們假定這兩個支架係統都是用3D打印按照同一套參數製作出來的,因此兩套係統之間的誤差在完全可以忽略的範圍之內。在這個前提下,我們可以得到一個非常有用的特性:這兩個係統之間隻存在著細杆通過鏈接而產生的拉力和推力,不存在豎直方向的剪切力。有了這個特性,我們在分析每個支架係統的轉動過程中的角動量與角動能時就可以忽略另一個支架係統的作用。這是由對稱性得出的直接結論,它對於分析這整個係統的動力學特性非常重要!
很明顯,由圖1至圖4所顯示的係統一定是一個永動機係統,而且是一個任何擁有3D打印機的人都可製作出來的永動機係統。這是因為這個係統不存在一個靜止的平衡態。因此,無論當每個支架處於什麽角度,我們都可根據杠杆原理得知,其中一個支架會做順時針轉動而另一個做逆時針轉動(這裏的順時針及逆時針指的都是從係統外麵看各個支架的正麵時的運動)。
所以,這裏我們就看到一個由杠杆原理決定了的無平衡態係統的永動機!
討論
並非所有的永動機現象都是由杠杆原理決定。最初促使我來研究永動機現象的DDWFTTW運動就不是由杠杆原理決定的。當然,任何一輛車子都少不了齒輪,而齒輪運用的就是杠杆原理,所以並不是說DDWFTTW運動就完全與杠杆原理無關,而是說杠杆原理在DDWFTTW運動中的作用並非象在本文上麵所介紹的永動機中的作用那樣直接。
另外,雖然本文所介紹的永動機與DDWFTTW車子都屬於無平衡態永動機,但是兩者的基本動力特性有所不同。本文所介紹的永動機是完全無條件的永動機,而DDWFTTW運動需要有初始的外加動量以使得係統進入到動態無平衡態之後才成為永動機運動。我們可以將前一種無平衡態稱為完全無平衡態,而後一種稱為動態無平衡態。相應地,我們可以將完全無平衡態的永動機稱為完全無平衡態永動機,而將DDWFTTW車子這樣的永動機稱為動態無平衡態永動機。

如果中央支架臂長為一米,不考慮摩擦力,它的最小角加速度·1為g/18,最大角加速度為343g/5367。
以這種加速度隻要11秒鍾就可以達到每秒轉一圈,一分鍾可達到每秒轉六圈,一小時可達每秒轉360圈,一天下來可達到8640圈。
這已經不是需要考慮摩擦力的問題了,而是要考慮空氣阻力,甚至材料強度的問題。
補充說明2:盡管沒必要,為了讓某些過慮的讀者放心,這裏再補充幾點:1)地麵需要非常平滑而且水平度極高(以引力波探測器的水平度的標準來建設);2)每個支架係統的底部為極大的,底麵極為平滑的重盤;3)在底部重盤上安裝垂直度極高的強度極大的豎樁;4)豎樁上在遠高於支架轉動直徑的高度處安裝強度極高,極其穩定的橫軸;5)橫軸上裝有極高質量的軸承(比Nike的最高檔的旱冰鞋的軸承的質量都高許多的軸承);軸承上裝著本文所設計的支架;7)支杆與細杆的鏈接的轉動摩擦極小;8)兩支架的細杆間的鏈接的摩擦極小;9)從底部重盤到支架上的每個部件都由同一套參數在高質量的3D打印機上進行3D打印製作出,因此兩套設備之間的差別在可忽略的誤差範圍內。
上述條件可以保證對稱原理的成立,使得兩套係統在轉動過程中的角動量和角動能不受另一套係統的影響。