-*-紫色王家思絮絮-*-
我思無邪、我行無悔



那裏,俺們介紹了三種不同形式的時空變換,包括大家所熟知的加利略變換 (Case a)) 和絡侖茲變換 (Case b)),然後介紹了第三種形式的“絡侖茲變換”:Case c)。文章結尾部分,俺們說了,將要考察這三種時空變換對應的幾何模型。
先說說那篇文章的一個錯誤,對應 Case c) 的。Case c) 對應的時空變換公式仍然有效,但是應該去掉那裏提到的適用範圍約束:那裏俺說了Case c) 對應有個最小速度的物理世界。這裏,“最小速度”這個限製應該去掉,那個變換和加利略變換一樣,適應於所有的速度。 絡倫茲變換之所以速度不能超過 1,是因為平方根的要求。這樣一來,上文最後兩個圖中的幾條直線 (紅色 and 藍色) 也就沒啥意義了,是多餘的。文章閑侃 (4) 也懶得修改,因為那不影響大局;而且,保留這種 traceable/trackable 的 mistakes,也挺有意思的。這裏,我們將上文閑侃 (4) 中的 statements a)、b)、c) 改成:
在看起來非常合理的假設下,從變換群的觀點出發,可以推理出咱們這個物理世界的時空變換必須對應以下三種情形之一:
a) 速度可以是任意值;時間是絕對的,時空的變換是拋物型的;
b) 速度存在個上限值;時空的變換是雙曲型的;
c) 速度可以是任意值;時空的變換是橢圓型的。
我們來考查三種時空變換的幾何結構。通常,不同的平麵幾何有不同的分類係統,比較常見的一 種分類係統是根據長度和角度的測量方法分類。長度的測量可以分為橢圓的、拋物的、雙曲的等三種類型,角度的測量也類似,也可以分為橢圓的、拋物的、雙曲的 等三種類型,所以整個平麵幾何就能分為九種不同類型的平麵幾何,見下表 (可以參見蘇聯學者雅格龍的著作,九種平麵幾何):
| 角度測量分類 | 長度測量分類 | ||
| 橢圓型 | 拋物型 | 雙曲型 | |
| 橢圓型 | 橢圓幾何學 | 歐幾裏得幾何學 | 雙曲幾何學 |
| 拋物型 | 伴歐幾裏得幾何學 | 加利略幾何學 | 伴閔可夫斯基幾何學 |
| 雙曲型 | 伴雙曲幾何學 | 閔可夫斯基幾何學 | 二重雙曲幾何學 |
對絕大部分讀者而言,除了熟悉“歐幾裏得幾何”以外,其餘的八中非歐幾何,恐怕都不會熟 悉。就幾何結構而言,其實是加利略幾何學最簡單,其次是歐幾裏得幾何學和閔可夫斯基幾何學。這裏,對 Case a)、b)、c) 而言,其對應的長度測量都屬於“拋物型”的 (具體什麽意思,因為篇幅的緣故,就不解釋了),但是就角度測量而言,它們是完全不同的。
曆史上最早出現的幾種非歐幾何:羅巴切夫斯基幾何 & 黎曼幾何,就是上表中的雙曲幾何和橢圓幾何。注意這裏的“黎曼幾何”和廣義相對論的數學工具“黎曼幾何”不是同一回事情。黎曼是高斯的學生,他們師徒都是 人類曆史上最有才華、成就最卓絕的幾位數學家之一。曆史上唯一能和他們師徒相提並論的,恐怕隻有歐幾裏得和阿基米德師徒。
熟悉群論的讀者很容易驗證,咱們所說的三種時空變換都各自形成一個連續群 (李群),分別稱為迦利略變換群、洛倫茲變換群,以及 Case c) 所對應的變換群。從幾何角度而言,每個時空變換對應著一次坐標旋轉 (因為群元的矩陣表示已經 normalized 成 1)。我們先從 Case c) 看起,因為從轉動意義而言,它反而是大家最熟悉的。我們暫且稱 Case c) 對應的變換為橢圓型絡侖茲變換 (暫時的名稱,以後有可能隨時改掉,嗬嗬)。
Case c) 橢圓型絡侖茲變換。考慮二維時空,我們有如下的變換:
t1 = b * ( t + v*x)
x1 = b * (-v*t + x)
或者寫成矩陣形式:
(t1, x1)' = A (t, x)',A_11 = b,A_12 = bv,A_21 = -bv,A_22 = b,這裏 b = 1/sqrt (1+v^2),v 是速度,可以取任意值,包括 0。如前所說,橢圓型絡侖茲變換保持二維時空的“距離” s^2 = t^2 + x^2 不變。
若定義角度 w 使得 cos w = b,sin w = bv,那麽很容易驗證:
A_11 = cos w, A_12 = sin w,
A_21 = -sin w, A_22 = cos w。
而且,
A(w1)*A(w2) = A(w1+w2)
例如 A(w1)*A(w2)_11 = cos w1*cos w2 - sin w1*sin w2 = cos (w1+w2),這和二維歐幾裏得空間的轉動是一樣的,這就表明橢圓型絡侖茲變換對應的平麵幾何關於角度的測量是橢圓型的,因此它對應的幾何恰好是歐幾裏 得幾何。見下圖中的第一個圖。
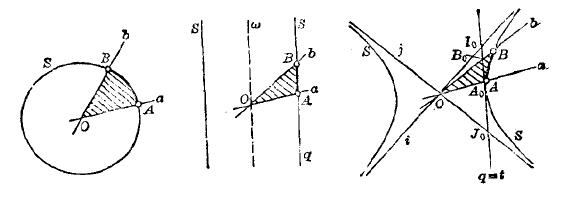
(歐幾裏得幾何、加利略幾何、閔可夫斯基幾何的單位圓和角度示意圖。
角度就是陰影部分的麵積)
Case a) 迦利略變換,我們有如下的變換:
t1 = t
x1 = x - vt
或者寫成矩陣形式:
(t1, x1)' = A (t, x)',
A_11 =1, A_12 = 0,
A_21 = -v, A_22 = 1,
v 是速度,可以是任意值,包括 0 和無窮大。如前所說,迦利略變換保持時間 t 不變,和 x 完全無關。很容易驗證:
A(v1)*A(v2) = A(v1+v2)
見上圖中的第二個圖 (並且和第一個圖對比),這時,第一個圖中的單位圓就退化成一根直線 t = 1,亦即迦利略變換下的不變量 t 取單位長度 (第一個圖中的單位圓就是橢圓型絡侖茲變換下的不變量 t^2 + x^2 = 1,對不對),因此它對應的平麵幾何恰好是加利略幾何。
Case b) 絡侖茲變換。(rescale 使得最大速度 -- 光速 = 1):
t1 = a*( t - v*x)
x1 = a*(-v*t + x)
這裏 a = 1/sqrt(1-v^2),就是所謂的洛倫茲因子。因為 v < 1,所以 a > 1,無須贅述。寫成矩陣形式:
(t1, x1)' = A (t, x)',
A_11 = a, A_12 = -av,
A_21 = -av, A_22 = a
如前所說,絡侖茲變換保持二維時空的“距離” s^2 = t^2 - x^2 不變。和上圖第一個圖對應的“單位圓”,就是雙曲線 t^2 - x^2 = 1。
若定義雙曲函數的雙曲角度 w 使得 cosh w = a,那麽 sinh w = av。對某些忘記了雙曲函數的讀者而言,我們這裏溫習如下:
sinh x = (e^x - e^(-x)) / 2; cosh x = (e^x + e^(-x)) / 2; tanh x = sinh x/cosh x;
利用恒等式(cosh x)^2 - (sinh x)^2 = 1,很容易驗證:
A_11 = cosh w, A_12 = -sinh w,
A_21 = -sinh w, A_22 = cosh w
而且,A(w1)*A(w2) = A(w1+w2),這和二維雙曲麵上的轉動是一樣的,這就表明絡侖茲變換對應的平麵幾何關於角度的測量是雙曲型的,因此它對應的幾何恰好是閔可夫斯基幾何。見上圖中的第三個圖。
對三種時空變換而言,其對應的動力學變換群 (作為李群) 都有十個生成元:三個直線運動 (boost) 對應三個生成元 (也就是不考慮動力學內容時上述變換群本身的生成元),時間方向對應一個生成元 (哈密頓量),三個空間方向的動量對應三個生成元,空間方向的三個轉動 (角動量) 對應三個生成元。自然,生成元之間的對易關係 (李代數結構) 是不一樣的,其中以加利略變換群的李代數結構最為簡單。加利略變換群和絡侖茲變換群的李代數結構都可以在教科書上查到。
下次閑侃俺若不碼別的內容,就會試圖導出“橢圓型絡侖茲變換”(Case c)) 所對應的 10 個生成元之間的代數結構,順便再考慮“橢圓型絡侖茲變換”和物理中假想的快子 (Tachyon) 之間有沒有聯係,i.e. 看“橢圓型絡侖茲變換”能否描述快子 Tachyon 的運動。
